特徴マッチングによる物体検知
2019/09/04
Python2.7.8, OpenCV4.1.1
# -*- coding: utf-8 -*-
import numpy as np
import cv2
MIN_MATCH_COUNT = 4
img1 = cv2.imread('box.png', 0) # queryImage
img2 = cv2.imread('box_in_scene.png', 0) # trainImage
img2c = cv2.imread('box_in_scene.png')
detector = cv2.AKAZE_create()
kp1, des1 = detector.detectAndCompute(img1, None)
kp2, des2 = detector.detectAndCompute(img2, None)
bf = cv2.BFMatcher()
matches = bf.knnMatch(des1, des2, k=2)
good = []
for m,n in matches:
if m.distance < 0.7*n.distance:
good.append(m)
if len(good)>MIN_MATCH_COUNT:
src_pts = np.float32([ kp1[m.queryIdx].pt for m in good ]).reshape(-1,1,2)
dst_pts = np.float32([ kp2[m.trainIdx].pt for m in good ]).reshape(-1,1,2)
M, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC, 5.0)
if M is None:
print ('No Homography')
else:
print ('Find Homography')
matchesMask = mask.ravel().tolist()
h,w = img1.shape
pts = np.float32([ [0,0],[0,h-1],[w-1,h-1],[w-1,0] ]).reshape(-1,1,2)
dst = cv2.perspectiveTransform(pts,M)
img2c = cv2.polylines(img2c,[np.int32(dst)],True,(0,0,255),2,cv2.LINE_AA)
else:
print ('Not enough matches are found - %d/%d' % (len(good),MIN_MATCH_COUNT))
matchesMask = None
draw_params = dict(matchColor = (0,255,0), # draw matches in green color
singlePointColor = None,
matchesMask = matchesMask, # draw only inliers
flags = 2)
img3 = cv2.drawMatches(img1,kp1,img2c,kp2,good,None,**draw_params)
cv2.imwrite('result_box_in_scene.png', img3)
cv2.namedWindow('Result', cv2.WINDOW_KEEPRATIO | cv2.WINDOW_NORMAL)
cv2.imshow('Result', img3)
cv2.waitKey(0)
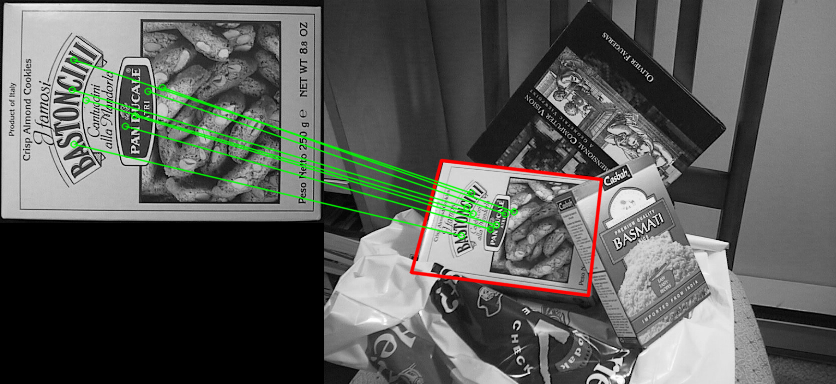
実行結果
 素材画像
box.png
box_in_scene.png
素材画像
box.png
box_in_scene.png
特徴点のマッチングとHomographyによる物体検出
http://labs.eecs.tottori-u.ac.jp/sd/Member/oyamada/OpenCV/html/py_tutorials/py_feature2d/py_feature_homography/py_feature_homography.html